SNA: A Network-Aware Framework for Decentralized Inverter-Based Voltage Control
Overview
This project develops a Scalable Network-Aware (SNA) learning framework for decentralized secondary voltage control in inverter-dominated distribution grids. Instead of relying on centralized critics that ingest global states/actions, SNA leverages the grid’s network structure so each critic only depends on local and κ-hop neighbor information, while actors are guided by their neighbors’ critics. This respects physical coupling, reduces input dimensionality, and preserves cooperation—enabling practical learning-based voltage regulation in large systems.
Just Ask for questions!
Explore our research with an AI assistant powered by the latest Gemini models and reliable sources to enhance your understanding and analysis.
Why This Research
- Operational pressure is rising. Variable renewables and prosumers cause fast, uncertain power fluctuations that defeat traditional capacitor/regulator-based schemes and leave primary droop control with steady-state voltage deviations. Decentralized secondary control is needed to restore nominal voltages at scale.
- Dominant MARL training is not scalable. Centralized Training & Decentralized Execution (CTDE) makes each critic depend on global observations/actions; dimension grows with the number of agents, causing sample inefficiency and poor training in large grids.
- Untapped prior: grid topology. Voltage control naturally has local interactions on the network. If we exploit this locality, we can cut critic inputs without losing the signal actors need to cooperate.
- Goal. Achieve scalable, theoretically justified decentralized voltage control that keeps voltages within limits under stochastic loads and model imperfections, while requiring only neighbor-level information exchange during training.
New Measures
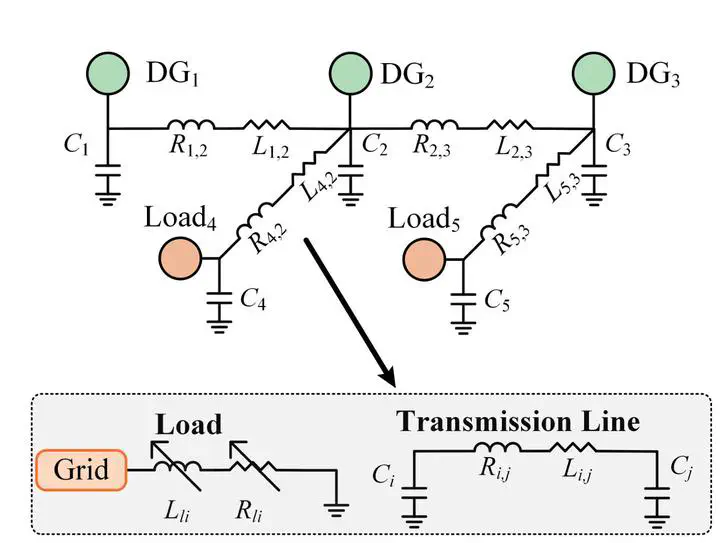
- Networked-MDP formulation of voltage control. The grid is modeled so that a DG’s next-state distribution depends only on its neighbors, aligning with EMTP-style discretization where interactions are effectively local.
- Exponential-decay property ⇒ truncated critics. We prove that an agent’s Q-function sensitivity to distant nodes decays exponentially with graph distance; hence a critic that only sees κ-hop observations/actions approximates the true Q with a bounded error $\le c \rho^{\kappa+1}$.
- Distributed actor guidance. Each actor is updated using the sum of its neighbors’ truncated critics, promoting local cooperation that aligns with global welfare—without any global critic.
- Algorithm-agnostic integration. SNA plugs into standard multi-agent actor-critic methods (e.g., MASAC, MATD3) by replacing the critic inputs and actor objectives accordingly.
- Communication-efficient training. Training requires only neighbor exchanges (tunable by κ), reducing bandwidth and improving privacy, with κ=1 often sufficient in practice.
Impact
- Scalability from tens to 100+ DGs. SNA trains effectively on systems with up to 114 DGs, surpassing prior decentralized voltage-control studies limited to ≈40 agents.
- Better training performance at scale. Compared to CTDE baselines, SNA attains higher final training rewards as agent count grows (e.g., 84/114 DGs), evidencing improved sample efficiency and critic learnability.
- Voltage quality improvements. Under identical disturbances, SNA reduces voltage-magnitude excursions versus PI and CTDE-trained policies; the proportion of nodes exceeding ±0.05 pu shrinks notably in large cases.
- Tunable locality for accuracy vs. complexity. Increasing κ tightens the approximation but enlarges inputs; on 114-DG systems, κ=2 can improve rewards, while κ=3 may hurt due to dimensionality—guiding practical κ selection.
- Plug-and-play across algorithms. Integrating SNA with MATD3 similarly boosts final rewards, showing method generality beyond MASAC.
- Deployment-friendly. Because SNA relies on neighbor-level data and distributed training, it aligns with realistic utility communications, easing field integration.
Publications
Jialin Zheng
Postdoctoral Fellow of Electrical Engineering
My research interests include machine learning, edge computing, and circuit design.