Large-Scale Cyber-Physical System Co-Simulation
Overview
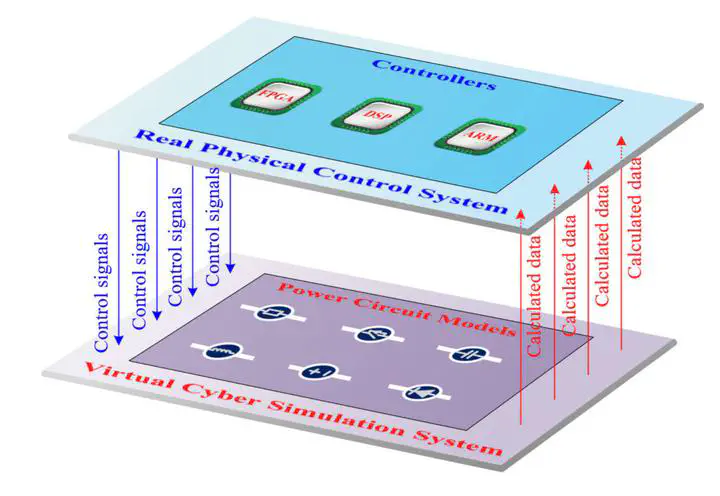
This project establishes a large-scale cyber-physical co-simulation stack for power electronics that unifies software simulators and physical controllers. We move from time-synchronous fixed-step interfaces toward event-axis synchronization, so the simulator–controller pair coordinates on switching and sampling events rather than rigid time ticks. The result is a system that retains switching detail, scales to MW-level plants, and remains robust under high data-interaction rates.
Just Ask for questions!
Explore our research with an AI assistant powered by the latest Gemini models and reliable sources to enhance your understanding and analysis.
Why This Research
- Scale & real-time tension. Classical CHIL ties simulation step sizes to tight real-time budgets; as switching frequencies and device counts grow, maintaining fidelity forces costly hardware or model simplifications that distort dynamics.
- Interface bottlenecks. Fixed-step synchronization (FSI) either wastes cycles or misses abrupt state changes; frequent handshakes balloon overhead and destabilize convergence in hybrid PES.
- Controller realism. SIL/PIL miss hardware behaviors (ADC/PWM, multi-stage latency). We need a path that preserves controller behavior consistency without hard real-time.
New Measures
- Event-axis synchronization (ES-CHIL / EDS / ESTA). Replace time-locked interaction with event-synchronous data exchange; use state/switch events to trigger both simulation and control computations, preserving logic while relaxing real-time constraints.
- Key-frame prediction + Adaptive Synchronization Interface (ASI). Predict imminent state-change “key-frames” to minimize synchronization points and dynamically size steps across tools (e.g., Simulink ↔ DSIM).
- Self-restoring fault-tolerant data rematching. A lightweight peripheral-IO strategy that rematches control and simulation data after link delays/failures—no simulator core changes—stabilizing high-rate controller–CPU co-simulation.
- Hybrid CPU–FPGA PCCO for MW-scale plants. A physical-controller co-simulation (PCCO) architecture with event-driven sync executes detailed models (incl. switching) on CPU/FPGA while maintaining controller behavior equivalence to real systems.
- DSED-based plant models for loss/fidelity studies. Use discrete-state event-driven simulation to evaluate losses and switching detail in multi-terminal MW PETs without exhaustive experiments.
Impact
- orders-of-magnitude sync efficiency. ASI reduces synchronization time cost by ~394× versus fixed-step interfaces while keeping accuracy in a 10-kVA MMC case.
- From kW MMCs to MW PETs. Event-driven PCCO demonstrates a 2-MW PET with 576 switches on a hybrid CPU–FPGA platform with preserved controller logic, expanding CHIL-class testing to MW-level systems.
- Robustness on commodity hardware. The self-restoring method maintains accuracy under high data-interaction frequencies on CPU-based simulators, avoiding OS/kernel modifications.
- Higher-fidelity device phenomena. Event-axis frameworks enable variable-step solvers and natural commutation detection (eliminating diode chattering), improving fidelity over time-locked CHIL.
Publications
Jialin Zheng
Postdoctoral Fellow of Electrical Engineering
My research interests include machine learning, edge computing, and circuit design.